実機Turtlebotへの接続と移動操作
TurtleBot3(実ロボット), シミュレーションの切り替え方法
すべてHost PC端末(Remote PC)で実行する。
- TurtleBot3実行方法
- roscore
ターミナルを開いて以下のコマンドを入力$ roscore - Turtlebot3 (リモート)駆動 : machine.launch
別のターミナルを開いて、以下のコマンドを入力(接続しようとするTurtleBot3の番号が09であると仮定)$ roslaunch exp3 machine.launch id:=09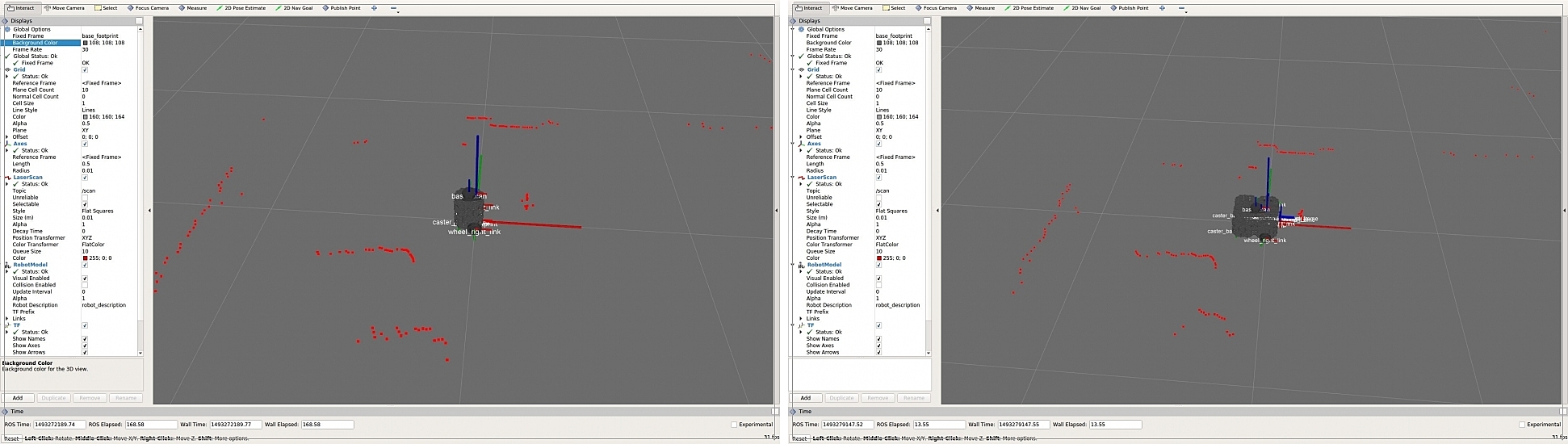
他のユーザーがTurtleBot3を使用している場合、launchファイル実行時に以下のメッセージが出て終了する。RLException: remote roslaunch failed to launch: tb3 The traceback for the exception was written to the log file - Rviz
新たにターミナルを開いて、以下のコマンドを入力する。$ roslaunch exp3 rviz.launch - teleop
TurtleBot3をキーボードでコントロールするために、teleop.launchを起動する。
$ roslaunch exp3 teleop.launch Control Your TurtleBot3! --------------------------- Moving around: w a s d x w/x : increase/decrease linear velocity a/d : increase/decrease angular velocity space key, s : force stop CTRL-C to quitキーボードのキーで自由に実機のturtlebot3ロボットを動かしてみる。
- roscore
- 使用切り替え
- 切り替え方法
- roscoreを含むすべてのnodeを終了(実行したターミナルで
CTRL+Cキーを入力) - 上記の実行方法に従って切り替え
- roscoreを含むすべてのnodeを終了(実行したターミナルで
- TurtleBot3 (実ロボット)とシミュレーションの比較
- 切り替え方法
課題
課題3
- Turtlebot実機に接続してノードを起動し(machine.launch)、教室のブロックフィールドに実機を置いてteleopで移動させてみよ。適当なところで停止させ、その様子を撮影した写真とその時のRVizの画面をレポートファイルに添付せよ。画面キャプチャには
gnome-screenshotコマンドを使うことができる。$ gnome-screenshot --area -f graph.jpg - 距離センサの反応する範囲にものを置いたり動かして、距離センサの反応がRVizの画面上で変化していることを比較して確認せよ。この時の実環境の様子とRVizの画面をキャプチャしてレポートファイルに添付せよ(2つの異なる状況でセンサーの反応が異なっていることがわかる画像を2種類添付すること)。
- 【追加課題】rqt_graphをつかって、実機を接続した状態のノードとトピックの全体図を画面に表示してみよ。gazeboでシミュレータ内のロボットと接続していたときと比較して、どこが異なるか、あるいは違いがないか、確認せよ。
実機とGazeboシミュレーションの差異
| TurtleBot3 | シミュレーション(Gazebo) | |
|---|---|---|
| 環境 | 多様な実際の環境 | Gazebo環境 - 提供 - Empty World - Turtlebot3 World - Turtlebot3 House - ユーザーが制作した環境  |
| モデル | Burger Waffle Waffle Pi |
Burger Waffle Waffle Pi |
| センサーおよびトピック名 | LIDAR : /scan IMU : /imu CAMERA(Waffle Pi) : /raspicam_node/image/compressed |
LIDAR : /scan IMU : /imu CAMERA(Waffle, Waffle Pi) : /camera/rgb/image_raw, /camera/rgb/image_raw/compressed |
| 使用機器 | Turtlebot3(Burger, Waffle, Waffle Pi) Remote PC(User PC) |
Remote PC(User PC) |